

Hi Zusammen,
in diesem Tutorial möchte ich Euch die Vorteile von RAMPS 1.4 an eurem 3D Drucker näher bringen. Meinen Anet A8 habe ich vor einigen Wochen umgebaut bzw. eben die Kern-Komponenten der Elektronik getauscht. Das ganze klingt erstmal ziemlich abschreckend für jemand der nicht sonderlich Technik-affin ist. –Sollte es auch sein. Trotzdem möchtet Ihr per Tutorial vielleicht euren 3D Drucker mit Ramps aufbauen.
Ich hab erstmal nicht sonderlich viel Ahnung von Elektronik im Kern, hab es zu selten nach dem Studium gebraucht. Meistens eigne ich mir das Wissen situationsbedingt an und komme ganz gut damit klar. Ich denke mit diesem Guide hier sollte es jeder hinbekommen. Vielleicht nicht auf Anhieb, aber mit Sicherheit nach Etwas „Trial and Error“. So war es zumindest bei mir ganz ohne Guide, ich hatte leider keinen tauglichen gefunden und musste mit Schnipseln über Google klarkommen.
Insgesamt kann ich jetzt nach rund 6 Wochen jedem den Umbau auf dieses modulare und preiswerte System empfehlen. Neben mehr Möglichkeiten zum Aufbau eures Druckers bekommt Ihr ebenfalls ein Stück Zukunfts-Sicherheit gegenüber manchen Standard-Boards. Zum Beispiel lässt sich Marlin in den aktuellen Versionen mit einigen mehr Features nur noch recht knapp auf das Board aufspielen weil der verbaute Speicher knapp wird.
Das RAMPS-Board hat hier noch ein wenig mehr Luft und sollte erstmal noch ausreichen in der aktuellen Board-Version. Mit einem RAMPS 1.4 Setup habt ihr außerdem die Möglichkeit das Heizbett eures 3D Druckers mit 24 Volt zu betreiben. Für einen Umbau des Creality CR-10 hab ich diesen Artikel geschrieben
Inhalt
- Benötigte Komponenten
- Schritt 1: Zusammenstecken der Komponenten Arduino Mega 2560 und RAMPS 1.4 Shield
- Schritt 2: Jumper stecken für die Stepper Treiber
- Schritt 3: Aufstecken der Stepper Treiber DRV8825 oder A4988 auf euer RAMPS-Shield
- Schritt 4: Aufspielen der Firmware und Einstellungen in Configuration.h
- Schritt 5: Anschließen der Komponenten
Benötigte Komponenten
- RAMPS + Arduino-Mega 2560 – die beiden Platinen, Arduino und Stepper Treiber-Board
- Reprap Discount 12864 LCD – vollgrafisches Display mit SD-Kartenleser
- 4 Steppertreiber-Platinen vom Typ A4988 (16 Schritt) ODER 4 Stepper Treiber vom Typ DRV8825 (32 Schritt) – bei einem Anet A8 sind 16 Schritte der Standard ab Werk. Wenn Ihr auf 32 Schritt umrüsten wollt braucht Ihr auch entsprechend andere Stepper-Treiber.
Ich rate Euch zu diesem KIT mit dem LCD 12864 Grafik Smart Display Controller. Hier ist eigentlich Alles an neuen Komponenten enthalten was Ihr benötigt. Und das für einen deutlich günstigeren Preis als ich erzielt habe. –Gab es damals leider noch nicht 🙁 Natürlich könnt Ihr Euch auch die Arbeit machen und selber nochmal recherchieren. Dieses KIT ist mit den A4988 Steppern. Ihr könnt natürlich auch direkt auf DRV8825-Stepper. Dann müsst Ihr aber wie in diesem Guide ein Stück von der Standard-Konfiguration abweichen. Ich habe DRV8825-Steppertreiber verbaut. In diesem Guide sind beide Wege beschrieben.
RAMPS 1.4-Kit auf Amazon
Darüber hinaus sollte eure Werkstatt für einen sauberen Aufbau / Umbau auch folgende Komponenten aufweisen, das meiste habt Ihr vielleicht sowieso:
- Litzen für Kabel-Verlängerung etc.
- Schrumpfschlauch zum ordentlichen Verkabeln.
- Lötkolben etc.
- Multimeter
- Crimpzange und Ader-Endhülsen
- Kabelschuhe
- Dupont-Stecker oder Jumper-Kabel für das RAMPS 1.4 Board
Luxus-Variante für die Verkabelung – fertig kaufen
Schraubendreher, Seitenschneider und eine Spitz-Zange sehe ich mal als wirklich sowieso vorhanden an. Damit habt Ihr dann aber wirklich Alles und wir können loslegen.
Schritt 1: Zusammenstecken der Komponenten Arduino Mega 2560 und RAMPS 1.4 Shield
Als erstes packt Ihr natürlich die einzelnen Komponenten aus und dann könnt auch schon mal den Arduino mit dem RAMPS-Shield zusammenstecken. Seid dabei vorsichtig, passt eigentlich aber nur in einer Variante sauber zusammen und man kann nichts falsch machen.
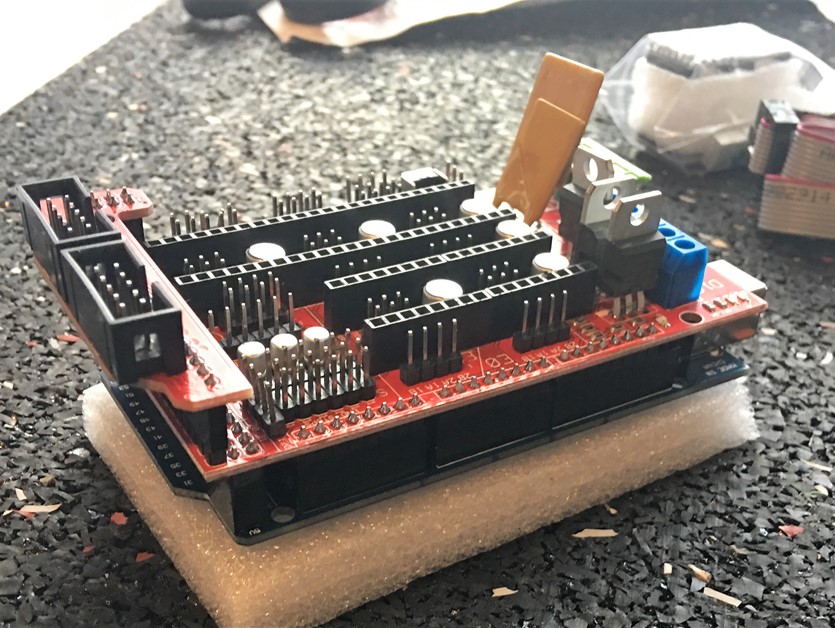
RAMPS 1.4 aufgesteckt auf ARDUINO Mega 2560
Schritt 2: Jumper stecken für die Stepper Treiber
Im nächsten Schritt stecken wir die Jumper für die Stepper-Treiber richtig. Mit diesen sagt ihr den Stepper Treibern mit wie viel Schritten sie arbeiten sollen. ACHTUNG, wie die Jumper gesteckt werden müssen ist neben euren gewünschten Schritt-Einstellungen davon abhängig, welche Steppertreiber ihr verwendet! Im Reprap-Wiki steht dazu folgendes:
jumper Yes/No step size
1 2 3
no no no full step
yes no no half step
no yes no 1/4 step
yes yes no 1/8 step
no no yes 1/16 step
yes no yes 1/32 step
no yes yes 1/64 step
yes yes yes 1/128 step
das sieht dann für uns quasi so aus:
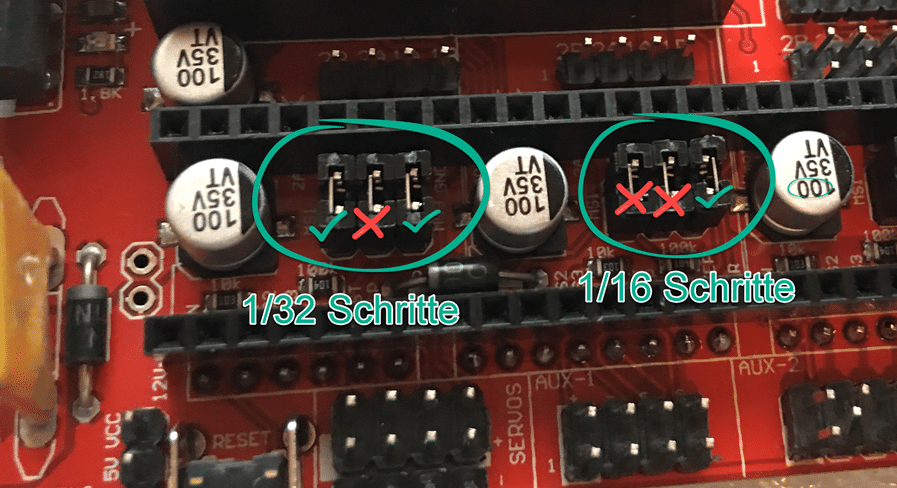
Jumper-Setting für Schrittmotoren-Treiber auf RAMPS 1.4
Aber nochmal, es ist wichtig welche Stepper Treiber Ihr euch zu eurem RAMPS 1.4 besorgt habt. A4988 können nur 1/16 Schritte.
Schritt 3: Aufstecken der Stepper Treiber DRV8825 oder A4988 auf euer RAMPS-Shield
Nachdem Ihr nun die Jumper gesteckt habt könnt Ihr die Stepper Treiber aufstecken, welche später die Jumper die Ihr grade aufgesteckt habt verdecken. Hier ist es besonders wichtig diese korrekt aufzustecken, da sonst RAMPS-Board oder Stepper Treiber beschädigt werden könnten. Ist aber relativ leicht wenn Ihr auf die Markierungen an Stepper Treiber und Board achtet. Ich hab mich dabei an einem äußeren PIN orientiert (DIR) orientiert. Den gibt’s nur einmal..
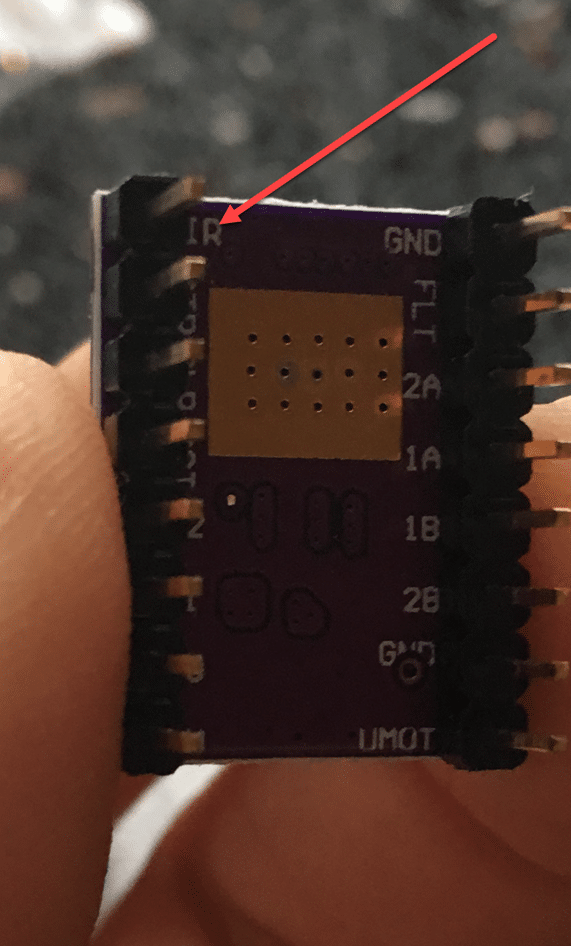
DRV8825 Schrittmotoren-Treiber
Dann sucht Ihr einfach ebenfalls auf dem Board nach (DIR) auf den Steckplätzen für die Achsen X,Y,Z und den Extruder. Damit solltet Ihr die Stepper Treiber korrekt aufstecken können, seid sorgfältig! Die Z-Achse verwendet für beide Motoren bei RAMPS 1.4 nur einen Treiber was deutlich geschickter ist als bei der Original-Lösung beim Anet A8 Standard-Board. Dafür hat mir dieses Schaltbild aus dem Reprap-Wiki sehr weitergeholfen:
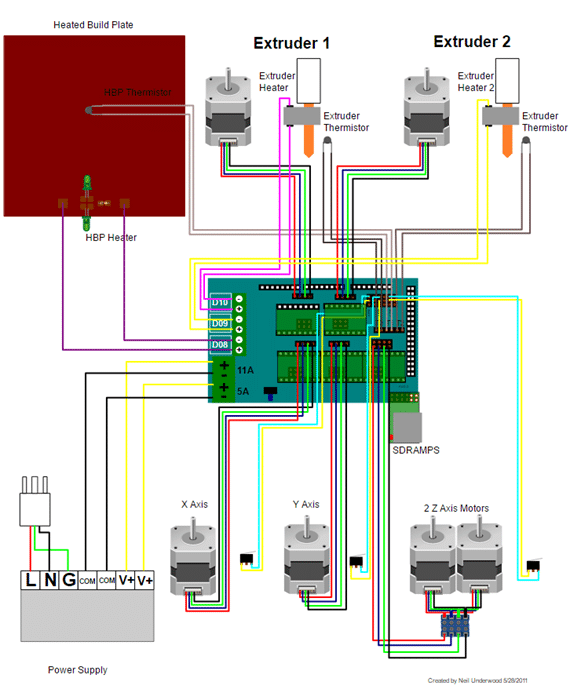
RAMPS 1.4 Schaltbild
Schritt 4: Aufspielen der Firmware und Einstellungen in Configuration.h
Ja Ihr lest richtig. Ich hab jetzt schon die Firmware aufgespielt, weil mein Drucker noch im Gehäuse stand und das ganze momentan ohne Verkabelung noch wunderbar mobil ist. Strom bekommen Arduino und RAMPS 1.4 dabei vom PC über das USB-Kabel. Hat wunderbar funktioniert. Als Firmware habe ich mich für MARLIN entschieden da mir Konfiguration und Features (Auto-Leveling) eigentlich zusagen. Marlin besorgt Ihr euch am besten direkt an der Quelle auf Github. Nachdem wir das ganze entpackt haben, widmen wir uns der Configuration.h und gehen die einmal von oben nach unten in Ruhe durch. Ich hab dafür eine Flasche Bier aufgemacht… Bitte seht die Zeilen-Nummern im nächsten Teil relativ. Kann sein das weicht bei Euch ein Stück ab, das ist aber für die Konfiguration völlig egal. Ich nehme meine Zeilen-Nummern mal als Referenz für diesen Artikel, so wisst Ihr ungefähr wo Ihr suchen müsst.
Ich habe die Dateien in einem externen Editor (Notepad++) bearbeitet. Ihr könnt das aber auch direkt in der ARDUINO IDE erledigen. Für das aufpsielen auf euer RAMPS1.4 benötigt Ihr diese sowieso. Ich habe die Version 18.2 genommen. Wenn Ihr in der Arduino IDE arbeitet, öffnet Ihr direkt in dem Ordner wo sich Marlin befindet die Datei „Marlin.ino“. Alle weiteren zugehörigen Dateien werden dann automatisch geöffnet.
Baudrate und RAMPS 1.4 Board definieren
Als erstes kümmern wir uns um die Deklaration der Baudrate bei ca. Zeile 125. Ich habe immer 115200 genommen und bin damit gut gefahren.

In Zeile 133 sagen wir Marlin welche Board-Konfiguration wir verwenden. Man kann das RAMPS 1.4 mit unterschiedlichen Konfigurationen betreiben. Wenn man zum Beispiel einen Dual-Extruder verwendet, weicht die Konfiguration hier. Für einen 3D Drucker ähnlich dem Anet A8 ab Werk habt Ihr einen Extruder, einen Bridging-Fan sowie ein beheitztes Bett. Die passende Konfiguration für die Kombi lautet „E(xtruder)F(an)B(ed)“. Wir definieren also folgendes:

Drucker-Namen vergeben
Wenn eurem Drucker einen Namen vergeben wollt könnt Ihr das in Zeile ca. 138 tun:

Extruder-Anzahl und Temperatur-Sensoren
In Zeile 146 könnt Ihr die Extruder-Anzahl bestimmen. Standardmäßig gehört hier also eine 1 hin.

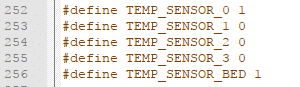
In Zeile ca. 252 definiert Ihr die Temperatur-Fühler mit den eurer Drucker arbeiten soll. Standardmäßig werdet Ihr einen für Extruder und einen für das beheitze Bett haben. Dann sieht die Konfiguration wie folgt aus:
Minimal-Temperatur und Maximal-Temperatur für Sensoren definieren
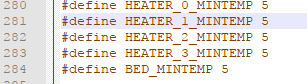
An der Stelle um Zeile 280 könnt Ihr Mindest-Temperaturen definieren, welche mindestens erreicht sein müssen damit euer Extruder beim Start vom Aufheizen überhaupt mit Heizen beginnt. Das ist eine klasse Sache und stellt sicher, dass eure Thermistor-Verkabelung richtig ist. Standardmäßig sind dort 5 Grad eingestellt. Könnt Ihr gerne höher stellen aber ich habs so gelassen. Jedenfalls eine schicke Sache dass die Firmware hier prüft.
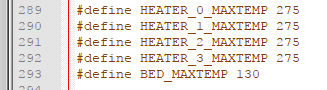
Um Zeile 289 könnt Ihr die maximale Temperatur die eingestellt werden kann für Extruder und Heizbett definieren. Solltet Ihr auf jedenfall tun, macht das ganze sicherer. Standardmäßig sind 275 Grad für Extruder und 130 Grad für das Druckbett definiert.
PID-Tuning und Thermal Runaway aktivieren für Heizbett
Im Bereich um Zeile 345 könnt Ihr das PID-Tuning für euer Heizbett aktivieren. Solltet Ihr am besten gleich miterledigen. Damit könnt Ihr später das Heizen des Betts kalibrieren. Das könnt Ihr in meinem anderen Artikel sehr gut nachlesen.

Marlin hat eine Funktion eingebaut die sicherstellen soll, dass Euch nicht die Bude abfackelt wenn ein Thermistor ausfällt. Stellt sicher dass Ihr die folgenden Zeilen nicht auskommentiert habt.

Endstop Settings
In Zeile 434-436 sagen wir der Firmware, das wir Endstops für alle 3 Achsen verwenden und das jeweils an der Minimal-Position. Also Ausgangsposition.

Schritte der Achse / Steppermotoren einstellen
In Zeile 489 definieren wir die Schritte für die Achsen die nötig sind, um einen Millimeter zu fahren.
Verwendet Ihr A4988 mit 1/16 Schritten sieht das standardmäßig folgendermaßen aus:

Wenn Ihr DRV8825 mit konfigurierten 1/32 Schritten verwendet (dazu müsst Ihr auch für 1/32 die Jumper gesteckt haben, siehe oben), solltet Ihr mit diesen Werten starten:

Max Feed Rate definieren
In Zeile 496 definieren wir die Max Feed Rate:

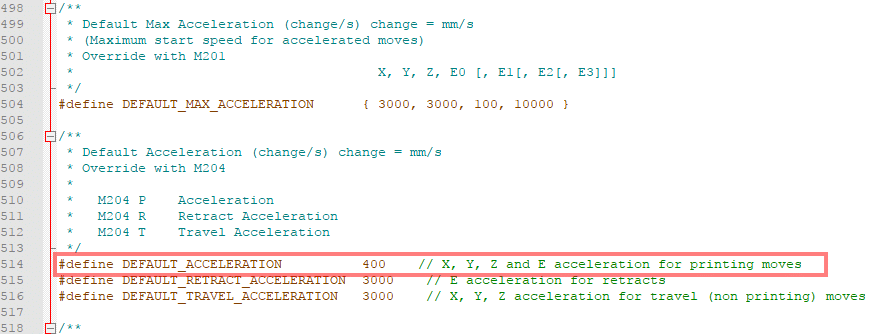
Maximale Beschleunigung und Jerk-Settings
An dieser Stelle sagen wir der Firmware, wie schnell die Achsen maximal beschleunigt werden dürfen. Diese Einstellungen sind global und sagen, dem Drucker die Achsen niemals schneller zu bewegen. Ich habe einen verstärkten Rahmen und habe deshalb recht hohe Werte. Solltet Ihr einen Acryl-Rahmen verwenden rate ich zu niedrigeren Maximal-Werten von 400 mm /s. Am besten mal niedrig starten und schrittweise anheben wenn Ihr mit dem Aufbau fertig seid und ein paar Testdrucke macht. auch bei Default_Max_Acceleration solltet Ihr eher nach unten Schrauben wenn Ihr in Geschwindigkeitsprobleme lauft. Auch hier sind im folgendem Bild die Standardwerte.
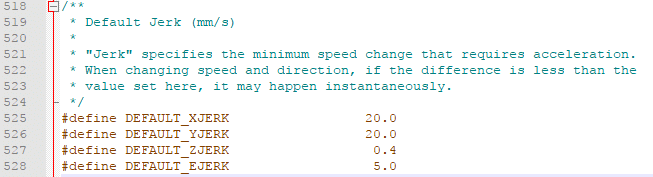
Die Jerk-Settings sagen der Firmware welches der minimale Geschwindigkeits-Unterschied zwischen Bewegungen ist, welche eine Beschleunigung erforderlich machen. Leichte Schwankungen in der Geschwindigkeit werden somit ignoriert. Folgende Werte sind standardmäßig für den Anet A8 hintelegt. Ich würde Euch raten diese Werte zu halbieren.
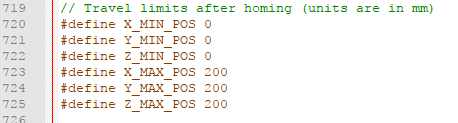
Max-Geschwindigkeit und Travel-Limits für das Homing
Bei ca. Zeile 886 definiert Ihr die Geschwindigkeit fürs Homing von X und Y Achse

So um Zeile 720 definiert Ihr die Travel-Limits für eure Achsen. Sprich, wie weit die Achsen gefahren werden können. Je nach eurem Aufbau könnt Ihr hier später noch Fein-Tuning betreiben. Wenn Ihr euren Bau-Raum voll ausreizen wollt, müsst Ihr hier sogar anfassen. Gute und sichere Startwerte sind:
Filament-Runout Sensor
So um Zeile 729 könnt Ihr euren Filament-Runout-Sensor konfigurieren wenn Ihr euch einen gebaut habt. Diesen Punkt sehe ich mal als optional und werde Ihn in einem anderem Artikel beschreiben ähnlich dem Auto-Leveling.
Auto-Leveling / Auto Bed-Leveling
Von oben nach unten gesehen ist jetzt das Auto-Leveling in der Configuration.h dran. Ich werde in diesem Artikel nicht darauf eingehen da ich einen sehr beliebten gesonderten Artikel geschrieben habe. Diesen findet Ihr hier.
EEPROM aktivieren
Wenn Ihr nicht wegen jeder Einstellung den Drucker neu mit der Firmware bespielen wollt bietet MARLIN EEPROM-Settings. Hier könnt Ihr im Betrieb Werte in der Konfiguration auslesen, überschreiben und neu abspeichern. Das solltet Ihr in jeden Fall aktivieren.

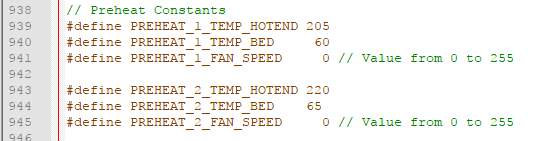
Temperaturen für Preheat via Menü
Wahrscheinlich kennt Ihr diese Einstellungen schon aus dem Menü eures Druckers. In der Firmware können Standard-Temperatur-Kombinationen eingestellt werden die später im Menü auswählbar sind. E.g. „Preheat PLA“ und „Preheat ABS“ Die Einstellungen dazu finder Ihr bei ca. Zeile 938.
Menü-Sprache festlegen
In Zeile 1064 könnt Ihr die Menüsprache festlegen. Da die Übersetzungen sehr gut sind, hab ich deutsch gewählt.

RAMPS 1.4 SD-Karten Support
Wenn Ihr ein Display mit SD-Kartenslot genommen habt. Wie oben beschrieben z. B. das Reprap Discount 12864 LCD, dann müsst Ihr hier der Firmware sagen dass Ihr einen SD-SLOT habt und Ihn verwenden wollt. Das findet Ihr in Zeile 1109

Individuelles Menü für das Achsen-Homing
Wenn Ihr jede Achse dediziert nullen können wollt, dann braucht Ihr dafür das individuelle Menü. Dieses könnt Ihr optional in Zeile 1172 aktivieren.

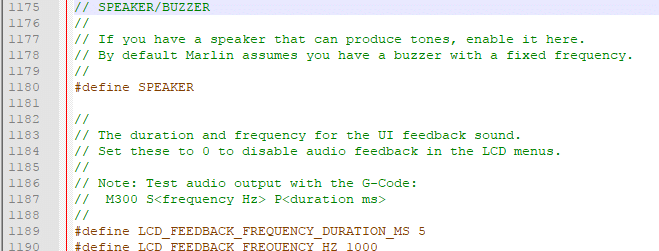
„Biepser“ aktivieren an eurem Display
Wenn euer Display einen kleinen Speaker verbaut hat, könnt Ihr mit Marlin die akustischen Feedbacks verwenden. Dazu müsst Ihr die folgenden Zeilen aktivieren. Das Signal lässt sich in Frequenz und Dauer einstellen. In habe folgende Werte verwendet:
Display in Marlin konfigurieren
Ihr müsst Marlin außerdem noch mitteilen welches Display Ihr verwendet. Wenn Ihr das 12864 LCD verwendet, müsst Ihr die Zeile 1267 aktivieren.

Wenn Ihr das LCD 2004 habt, wie zum Beispiel in dem KIT von oben. Dann müsst Ihr Zeile 1249 aktivieren.

Damit seid Ihr dann fertig fürs erste mit der Firmware-Konfiguration und Ihr könnt speichern und das ganze kompilieren. Wenn Ihr ein Vollgrafik-Display verwendet braucht Ihr für eure ARDUINO-Umgebung noch weitere Bibliotheken. Mit der U8glib bekommt Ihr das ganze zum Laufen. Dafür ladet Ihr diese Bibliothek. Diese entpackt Ihr und legt Sie in der Installation der Arduino IDE in das Verzeichnis „libraries„.

Wenn Ihr die Firmware kompilieren könnt ohne Fehler, wählt Ihr bei Devices das Arduino Mega 2560 aus und den entsprechenden COM-Port wo sich euer Arduino befindet. Bei mir war es COM-3. Das kann / wird bei Euch anders sein. Am besten alles unnötige USB ausstecken dann werden die Auswahlmöglichkeiten schnell kleiner und Ihr findet euer ARDUINO mit dem RAMPS schneller. Nach dem Aufspielen der Firmware auf euer RAMPS 1.4 solle Marlin auch schon booten. Wenn Ihr das Display angeschlossen habt, solltet Ihr das ganze schon fertig sehen.
Schritt 5: Anschließen der Komponenten
Nun müsst Ihr noch dafür sorgen das Alles richtig mit dem RAMPS 1.4 verkabelt ist. Dazu gehen wir Schritt für Schritt die einzelnen Komponenten durch.
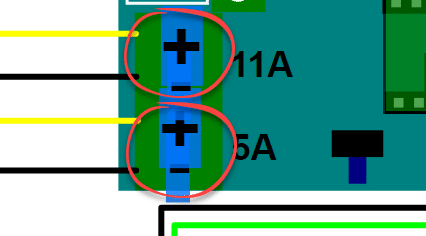
Stromversorgung anschließen RAMPS 1.4 vom Ausgang 12 Volt Netzteil
Das ist schnell erledigt. Führt den Zuleitungen von eurem Netzteil ausgehend jeweils ein eigenes Spannungspaar von jeweils einem Netzteil-Ausgang zu.
Endstops anschließen
Dazu ist diese Stelle auf dem Board interessant.

Ihr solltet dafür am besten außerdem einen Multimeter verwenden um eure Verkabelung und die Schaltung zu kontrollieren. Im Detail sieht die Verkabelung folgendermaßen aus:
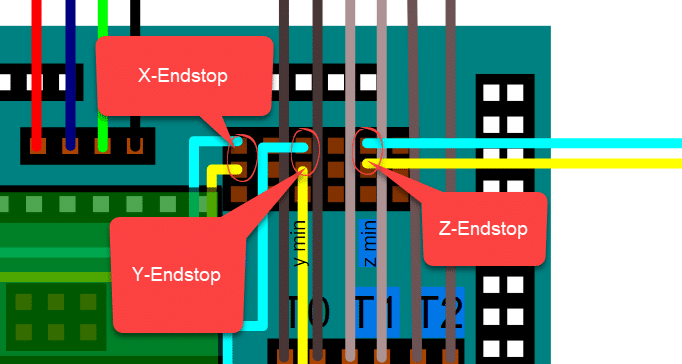
Zieht genügend lange Kabel weg vom Board die später bis zu euren jeweiligen Endstops reichen. Die Endstops verkabelt Ihr wie folgt:
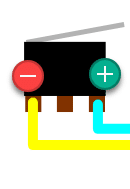
Das Schaltverhalten solltet Ihr aber nochmal mit dem Multimeter prüfen anschließend. Bei betätigten Endstop solltet Ihr eine Spannung von 5 V Volt messen. Gemessen an verbunden Kontakten des Endstops. Bei nicht betätigten Endstop darf keine Spannung anliegen. Das macht Ihr für alle 3 Achsen wie beschrieben und schon ist das Thema Endstops erledigt.
Stepper-Motoren anschließen und Referenz-Spannung einstellen
Bevor Ihr die Motoren auf dem RAMPS 1.4 anschließt solltet Ihr die Referenz-Spannung richtig einstellen. Dazu braucht Ihr in jedem Fall ein Messgerät (e.g. Multimeter) wie oben beschrieben. Wie Ihr die Referenz-Spannung einstellt ist hier bereits sehr schön beschrieben. Ein Anet-Motor arbeitet mit maximal 0,9 Ampere laut Gearbest. Sprich Ihr solltet die Referenzspannung auf 0,45 Volt einstellen. Wie Ihr das messt ist schön in dem Artikel beschrieben.
Danke an User Andreas dass ich das ursprünglich im Artikel vergessen hatte!
Motoren anschließen ist für alle Achsen und den Extruder schnell erledigt. Mit Ausnahme der Z-Achse.
Für X, Y und Extruder könnt Ihr eure vorhandene Verkabelung nehmen vom Anet A8. Für die Z-Achse ist der Platz auf der Platine leider nicht ausreichend für die Standard-Stecker.
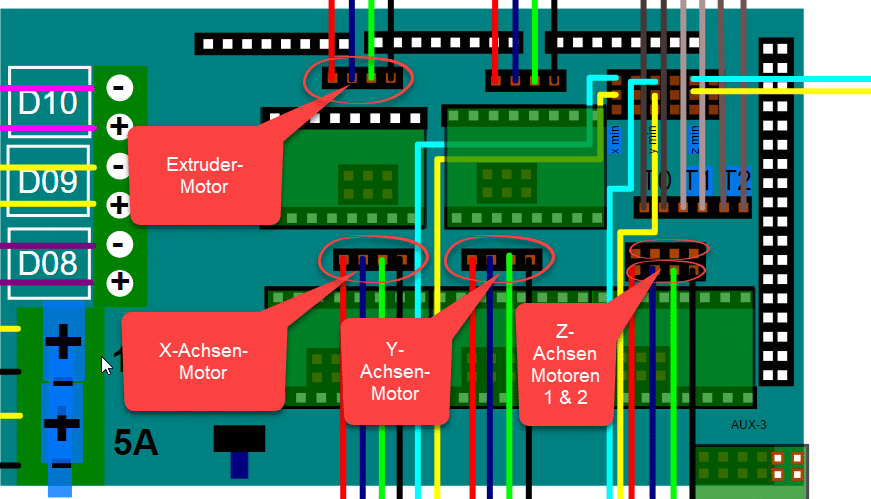
Ignoriert am besten die Farben eurer vorhandenen Kabel. Wichtig ist es gibt 2 Spannungspaare pro Motor. Standardmäßig sind die beim Anet A8 auf dem Stecker schon richtig angeordnet, außen und ein paar innenliegend. Damit Ihr wisst wie die Stecker draufgehören könnt Ihr das mit einem Motor einfach ausprobieren. Schließt dazu einen Motor mit dem vorhanden Stecker an und schaut ob sich richtig herum dreht wenn Ihr Ihn per Menü bewegt. Wenn er sich falsch herum bewegt, dreht den Stecker einfach um. Das geht für alle Motoren so.
Für die beiden Z-Motoren nehmt Ihr die Dupont-Stecker oder die Jumperkabel um die richtige Verkabelung zu erreichen. Ist ein wenig fummelig aber geht ohne Probleme.
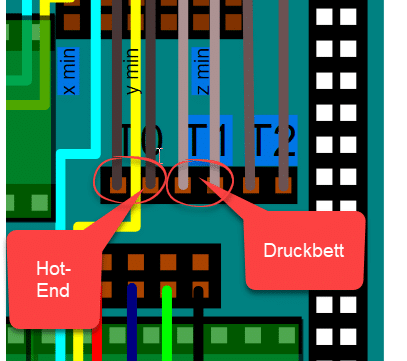
Thermistor von Hot-End und Heizbett anschließen
Da kann man nichts falsch machen. Die Thermistore sind nur Widerstände und haben keine Polarität. Jetzt einfach an den vorgesehen Stellen verkabeln:
Extruder, Heizbett und Cooling Fan verbinden
So jetzt müsst Ihr noch den Extruder das Druckbett und euren Cooling Fan verbinden. Das macht Ihr folgendermaßen:
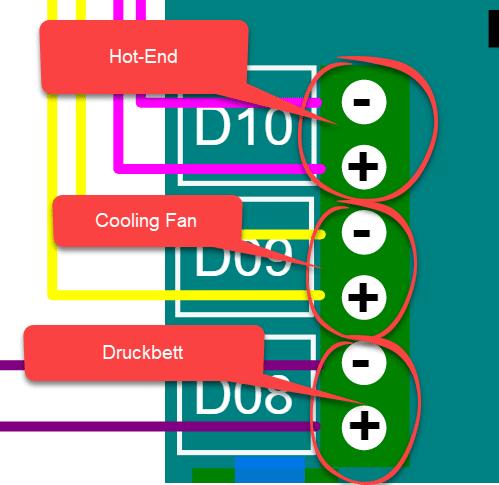
Damit habt Ihr alle Komponenten verbunden.Nun macht Ihr am Besten eine provisorische Aufräumaktion damit alles einigermaßen ordentlich verkabelt und verstaut ist und startet einen Testdruck. Danach solltet Ihr das Ganze noch ordentlich an eurem Drucker anbringen.
Ich hoffe der Artikel hat Euch geholfen, happy Printing!



{kind=link}
Vielen Dank für diese überaus detailierte Anleitung! Noch habe ich nicht vor umzubauen, dazu muss ich den Drucker erstmal besser kennenlernen. Mit solch einer Anleitung ist die Hemmschwelle jedoch massiv gefallen! Danke nochmals für die Mühe!
Hi, super Anleitung. Aber du beschreibst leider nicht wie man die Vref der Treiber einstellt und die sind am auf 1.7V gestellt und damit deutlich zu hoch für den Motor vom Anet, der laut Recherche 0.45V braucht. Wäre schön wenn du das noch hinzufügen könntest, da ansonsten die Motoren schnell mal Schaden nehmen können.
Hi Andreas,
grober Schnitzer. Vielen Dank für den Hinweis!
Super Beitrag.
Wie schaut es bei der Z-Achse aus, da sie zwei Stepper versorgt.
Bei meinem A6 Board (ist der einzige Treiber mit Poti) habe ich dort 0.85V gemessen.
Hi Minislot, soweit ich die Schaltung verstanden habe ist sie parrallel, also gleiche Spannung auf die Motoren. Somit gleich behandeln wie die anderen Achsen.
Ja die Motoren sind parallel angeschlossen.
Aber über die Spannungseinstellung am Poti wird (so wie ich es verstanden habe) der maximale Strom an den Stepper-Treiber eingestellt. Zwei Motoren bedeutet aber auch doppelter Strombedarf die der Treiber eben beiden Steppern zur Verfügung stellen muss.
Demnach je Stepper z.B. 1A Aufnahme wären bei der Parallelschaltung der Motoren 2A die der Steppertreiber liefern können muss.
Von daher wäre die bei mir gemessene Einstellung auch Plausibel.
https://www.my-home-fab.de/de/dokumentationen/technische-beschreibungen/drv8825-schrittmotor-strom-einstellen
UPS hatte den Namen Vergessen 😉
War mein Kommentar
Gruß
hi
Vielen Dank für diese Anleitung
hab da auch noch ne Anmerkung, Endstops würde ich auf Grund von Drahtbruchsicherheit etc auf NC (Normaly Closed) Anschließen, dann lieber in der firmware falls nötig invertieren grad die Schleppketten Verlegung wichtig, da diese Adern nicht Schleppketten geeignet sind dazu baucht man Hochflexibel Ist für Privatleute kaum zu bekommen.
Btw, So misst man keine Endstops, Sowas immer auf Durchgang messen nicht auf Volt
kleiner tipp vom Elektriker
Ein externes Mosfet ist nicht mehr erforderlich?
Hi Thomas,
erforderlich ist ein zusätzliches Mosfet nicht. Richtig verbaut, ist ein externes Mosfet natürlich nachhaltiger. Bis dato hab ich kein externes Mosfet verbaut, allerdings drucke ich auch kein ABS und komme daher mit gemäßigten Temperaturen zurecht was auch weniger Last auf den heizenden Komponenten bedeutet.
die last ist immer die selbe, die gibt das Heizelement vor obs nu auf 210 °c heizt oder auf 300°c ist dabei egal, die last liegt evtl seltener an da 210°c leichter gehalten werden als bsp 300°c. (thermosensor schaltet an schaltet ab etc flickernde led)
ich würde zu mosfet raten, erst recht wenn man sone scherze mit dem anet macht wie ich, hab mittlerweile auf 440mm Y achse erweitert und da muss ich nicht 30A-40A übers board jagen mit 2 heatbeds ( 10 a pro bed)
einfach herrlich geschrieben muss ich sagen hat mir sehr geholfen, hab grad noch nen selbst gedruckten anet heir stehen komplett mit spindel antrieb ohne riemen, dank deinem tutorial weiss ich nu auch wo ichs einstellen muss was 1 cm ist 😉
will den zur portalfräse machen, sieht bislang recht gut aus das es klappt
Hi, danke fürs Feedback. Ich glaub mir wir meinen das Selbe. Die maximal anliegende Last ist immer die selbe ohne Mosfet, richtig. Sie legt eben kontinuierlicher desto höher das Temperatur-Niveau.. Freue mich über Rückmeldung zu deinem Projekt
Super Beitrag, werde ich die Tage umsetzen 😉
Wo finde ich die U8glib?
Habe diese über Google geladen:
https://github.com/olikraus/u8glib
Aber beim Überprüfen kommt die Meldung:
#error „unknown CPU“
Ungültige Bibliothek „Pfad“ in „pfad“ gefunden
Danke MiniSlot
Auf viele weitere solch gute Beiträge dieser Art von dir.
Hi Minislot (again ;-)),
danke! Hab den Link noch ergänzt!
Hallo. Hatte gerade einen Kommentar geschrieben. mit dem Fehler CPU Error.
Hat sich erledigt.
Wäre vielleicht ewähnenswert das man im Arduino/Werkzeuge noch das Board auswählen muss.
Grüße MiniSlot
Hi Minislot,
steht im Artikel schon drin. Noch ein Hinweis in den Kommentaren schadet aber nicht! 😉
Ich konnte erst fehlerfrei kompilieren „nachdem“ ich das richtige Board ausgewählt hatte.
Aus dem Text geht hervor : „wenn fehlerfrei kompiliert, dann Board wählen“ 😉
Jedoch hatte ich eine frische Arduino-Installation ohne vorher schon mal angeschlossenes Board zu haben überprüfen lassen (das war noch auf dem Postweg).
Auf jeden Fall habe ich nach deiner Anleitung bereits alles durchgeführt bis auf das Verkabeln (kommt heute Abend dran).
Das Board startet, Marlin wird angezeigt und ich kann in den Menüs bereits herum spazieren.
Hab den Umbau fertig.
Musste allerdings alle drei Jumper bei den Treibern setzten, da die Stepper sonst nur eher grob und unkontrolliert Zuckten als drehten. Nach dem Setzen aller drei laufen sie nun sanft und leise.
Nur ein Problem hab ich noch der Extruder Stepper dreht nicht. Stepper und auch Treiber sind in Ordnung (Kreuzvergleich mit anderer Achse). Es scheint, das der Befehl nicht am Treiben ankommt.
Meine Odyssee geht weiter 🙁
PS:
Was ich noch herausgefunden habe ist das mnan die Endschalter nicht umlöten muss, wenn man in Marlin in der Sektion *Endstop Settings* bei #define X(Y,Z)_MIN_ENDSTOP_INVERTING den Wert von false auf true ändert. Das hab ich aber erst gefunden nachdem ich deine Version gemacht hatte.
Hi MiniSlot! Viel Erfolg weiterhin! Das mit den Endstops stimmt, ja. Das über die Firmware abzubilden als Abweichung von der Standard-Konfiguration steigert meiner Meinung nach halt auch die Komplexität des Projekts. „Beim nächsten flashen der Firmware musst Du wieder dran denken etc.“
Ist dann jetzt eigentlich die Jumper-Tabelle im Wiki falsch? Direkt darunter steht doch
„For now the default is maximum micro stepping (all jumpers installed under drivers), which results in 1/16 micro stepping for A4988 drivers and 1/32 for DRV8825.“
D.h. doch explizit, alle 3 Jumper setzen für 1/16 beim A4988 … ?
Hi Florian,
ich hab eben nochmal im Reprap-Wiki geprüft und stimmt! Theoretisch kannst Du alle Jumper Stecken für das Maximum. Geht also ebenfalls wenn man die entsprechenden Treiber voll nutzen möchte.
Hast du deinen A6 mit Orginal Display laufen.
Ich würde meinen auf gerne auf RAMPS umbauen, doch ich hab immer noch die ein oder andere Schwierigkeit/Frage bevor ich das bestelle und tue. Wenn du dich mal melden könntest wäre toll.
VG
Sascha
Super Anleitung, bin gerade dabei sie umzusetzen. Bezüglich des Cooling Fans eine Frage:
Beim Anet A8 sind doch 2 Lüfter dabei, für Extruder und Bauteil, werden die beide parallel an D09 angeschlossen? Das würde mich wundern, da sie jeweils unterschiedlich angesteuert werden. Habe ich etwas übersehen?
Hi jp, gute Frage!
Den Lüfter für das Hot_End stattest Du mit konstantem Strom aus. Der angesteuerte Lüfter des Boards ist der Bauteil-Lüfter!
Danke für die schnelle Antwort! Nach weiterem darüber Nachdenken erscheint das durchaus sinnvoll. 😉
Endlich mal eine Anleitung, die den Namen verdient. Gut Ding will Weile haben. Deshalb hab ich wahrscheinlich auch sehr lange suchen müssen, um darauf zu stoßen.
Manchmal sieht man auch den Wald … nicht.
Ich bin absoltuter 3D Druck-Novize.
Jetzt kann’s endlich losgehen.
Homen geht schon, aber ich bring die Marlin noch nicht auf die Platte. Ist wohl ein falscher Treiber am Platzl.
Oder doch ein am MEGA-defekt ???
Prima Anleitung, aber auch ich kriege es nicht hin….
nach Anpassung von der Firmware kriege ich den nicht mehr geladen. Arduino arbeitet nur mit .ino oder .pde Bestände…
Bedeutet das dass ich nur mit ein bestimmten Editor in die liste kann??
Servus!
Danke erstmal für die Top Anleitung hat mir sehr geholfen!
Hatte übrigens auch Probleme mit der Firmware und hab mir daher die „alte“ Marlin 1.1.3 geholt, die neue bekomme ich selbst im „Werkszustand“ also ohne etwas geändert zu haben Probleme beim Prüfen.
Noch n Kleines Feedback von mir:
– Als Info beim A4988 und 1/16 müssen alle 3 Jumper gesetzt werden (Laut Reprap).
– Würde ich die Stopschalter nicht umlöten, eher in der Software Invertieren, damit ist man direkt Failsafe.
Ich muss nun morgen nur noch die Y und Z Achse in Betrieb nehmen, die wollte heute noch nicht 🙁
Viele Grüße
Marcy
Hi Marcy,
das Thema mit dem PIN-Setup hatten wir bereits in den Kommentaren. Im Wiki steht per default werden mit allen PINS die maximalen Steps genommen. Das steht im Konflikt mit der Tabelle die genau drüber steht im Wiki. Es ist also beides möglich. Ich hatte Probleme mit einigen Steppern-Treibern und dem setzen von sämtlichen Pins. Laut Wiki, ist es aber möglich es so zu machen.
Zu den Endstops. Ich gehe davon aus das Marlin-Setup wird sich in den default-Werten erstmal nicht ändern und halte es deshalb für gefährlicher, in der Software was anzupassen. Das muss dann bei jedem Update berücksichtigt werden. Beim Hardware-Setup nur einmal.
Hey,
Ok das mit den Pins hatte ich nicht gelesen.
Das mit den Endstops ist natürlich richtig, das muss dann beachtet werden, ist beides so eine Sache, ich selbst komme aus dem Sondermaschinenbau, und hier wird man eben immer die Variante mit dem Failsafe wählen.
Hier wird aber auch kein Programmierer auf die Idee kommen einen Sensor in der Software anders abzufragen 🙂
Nachmals danke für diese Anleitung!
Gibt es ein Video oder irgendetwas ähnlich , ich habe vor mein anet a8 zu verbessern aber nachdem ich allen Kommentaren gelesen habe es ist unmöglich dass ich alles richtig mache !
Hallo Noktok,
danke für diese gute Anleitung.
Bin gerade beim umrüsten.
Die Achsen laufen prima, aber den Schrittmotor für den Drahtvorschub bring ich nicht zum Laufen.(Anschluss an E0, ….Motor ist OK, ….Test über Y- Achse)
Gibt’s da etwas was ich übersehen haben könnte?
Danke.
Hi Wilfried,
erstmal hast Du da sicher Alles richtig gemacht. Steppertreiber vielleicht falsch aufgesteckt am E0? Am besten den auch mal auf einen anderen Sockel stecken z.B. Y-Achse
hallo Noktok,
danke, aber mittlerweile läuft das System ausgezeichnet.
Nach einem Kaltstart des Druckers und Laptop hat sich das Problem von selbst gelöst.
Sehr informativ, danke!
Hallo und erstmal Danke für die klasse Anleitung 🙂 Ich komme mit dem Entpacken der U8GLIP nicht klar, habe Sie hier https://github.com/olikraus/u8glib geladen, nur weis ich nicht in welches Verzeichnis/Pfad Sie soll. Nutze die Arduino App über den Mac, da habe ich kein Installverzeichnis 🙁 Nutze den LCD12864.
Eine Anmerkung zur Config.h – Ich habe mir gleichzeitig die Skynet 2.3.2 Config.h für meinen A6 (gibt es auch für A8) geladen und damit die aktuelle Marlin Config.h verglichen und angepasst.
VG Jeaper
Hi, leider kann ich Dir da mangels Mac keine von mir bestätigte Antwort geben :-/
Im Arduino-Forum steht folgendes:
https://forum.arduino.cc/index.php?topic=88380.0
Habe alles wie beschrieben erledigt. Lediglich die Z Achsen Motoren clicken während dem Druck beim kompensieren der Druckfläche (Auto Bed Leveling). Denke mal er überspringt steps. Weiß jmd wie das zu lösen ist. Habe bereits die Spannung erhöt. Das hat das Problem gebessert aber nicht behoben.
Hallo ich hab die DVR Treiber auf 32 Schritte und sobald der Motor läuft ein unschönes Hochfrequentes Pfeifen. Kennt wer eine Abhilfe?
Hi Patrick, auf 12 Volt ist ein leichtes Pfeifen nicht ganz unüblich bei den 8825. Sollte aber normal nicht weiter störend auffallen. VREF minimal verändern sollte Abhilfe schaffen.
Leichtes Pfeifen wäre ok aber das ist schön nen richtiges singen.
Hmm, lauter bzw. nerviger als die üblichen kleinen Boards aus den Kits darf es nicht sein, sonst stimmt was nicht. Vielleicht ist ja auch das was für Dich? http://chinadrucker.de/2017/creality-cr-10-zen-mod-marlin-tmc-2100-ramps/
Die TMC wollte ich eigentlich auf den Hauptachsen (X und Y) verbauen, am Extruder als auch an der Z sollten die DVR Treiber ihren dienst verrichten, jedoch nicht bei der Lautstärke.
Hi Patrick, würde ich nicht machen. SO schlau war ich anfangs auch mal und hab gedacht die Z-Achse fährt ja sowieso nicht 🙂 Ich rate Dir komplett auszutauschen, dann hast Du Ruhe
Hi, erstmal vielen Dank für die Anleitung, habe jetzt den Mega, das Das RAMPS und die 8825 Stepper und das ganze als 32er Schritte gejumpert. Das Bild mit den Jumper verwirrt etwas, wenn da ein rotes X ist und ein Jumper steckt, aber mit paralleler suche wird man fündig. Saftey first. Referenzspannung habe ich auf 0.45V Doch Dummerweise habe ich eins verpennt und hoffe auf Hilfe. Ich selbst habe einen Anet A6 mit Display und Rotary Knopf, doch leider fehlt mit jetzt der Adapter für die beiden Display Anschlüsse vom A6. Auf die SD-Karte verzichte ich, aber habe ich ne Chance das Modul einzeln zu bekommen oder hast du ne Info wie ich das Orginal Display da dran bekomme ?
Info würde mich freuen.
VG
Sascha
Hi Sascha, danke für das Feedback. Du meinst den Display-Adapter. Hab auf die schnelle diese hier gefunden. Hoffe das hilft, viele Grüße
Verdammt, das ging fix 🙂
Vielen Dank dafür, eins habe ich doch noch, dieser Tronxy Bed Level Sensor war nen Fehler, aber nun habe ich Ihn. Hast du da auch noch nen Tipp wie ich den an das RAMPS anschliesse bevor es qualmt 🙂
Gruß
Sascha
Hmm bevor Dir falsche Tipps gebe sage ich lieber nein. Du meinst sicher so einen eckigen induktiven Sensor. Sofern er einen nur einen identischen Anschluss hat wie das Z-Endstop, einfach tauschen. Mehr zum Thema generell findest Du auch hier auf dem Blog.
Moin, ja genau diesen blauen eckigen Sensor. Ich habe diesen am orginal Mainboard und ich denke ich habe den Pinout gefunden. Ich muss nochmal messen was passiert wenn dieser schaltet. So wie ich das sehe wird auf GND geschaltet ansonsten eben offene Leitung. Sofern ich das raus habe und funktioniert melde ich mich, dann kannst du das vielleicht in diese super Anleitung mit aufnehmen, genauso wie das mit dem orginal Display. Wäre ja optional möglich für A6 Besitzer. Die Display Adapter kommen aber erst nächste Woche.
VG
Sascha
Nabend 🙂
– erst mal einen herzlichen Dank für die Mühe, Zeit und Arbeit die in dieser Anleitung stecken 🙂
Habe ich immer großen Respekt davor. Sehr schön gemacht.
Ins besondere das mit den Steppern hat mir sehr gut gefallen – Danke dafür!
Evtl. kann ich helfen noch ein, zwei in meinen Augen nicht ganz unwichtige Dinge noch zu verbessern, die mir während meinem umbau von A8 „default“ auf ramps, mit dieser Anleitung, aufgefallen sind.
Wenn ich es richtig verstanden habe gehst du in der Anleitung von der default ausgelieferten „configuration.h“ aus? (Ich weiß es gibt ein Template für den A8).
Ich konnte aber nichts dazu hier finden, vll. fehlt somit nur dieses kleine Detail 😀
– Sollte ich irgendwas überlesen haben, entschuldige ich mich im Voraus!!
Falls aber doch wirklich die default gemeint ist, das hatte ich versucht, hier meine Erfahrung damit:
In meinem Fall musste ich zwingend die Endstop-Definition anpassen.
Beim ersten Start sind mir die Axen ins Nirvana gelaufen :/
// Mechanical endstop with COM to ground and NC to Signal uses „false“ here (most common setup).
#define X_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop.
#define Z_MIN_PROBE_ENDSTOP_INVERTING true // set to true to invert the logic of the probe.
Ich habe zusätzlich noch:
#define ENDSTOP_INTERRUPTS_FEATURE
auskommentiert und dadurch aktiviert.
Die Travellimits habe ich ebenfalls ein wenig angepasst:
define X_MAX_POS 220
#define X_MIN_POS -33
#define Y_MAX_POS 220
#define Y_MIN_POS -10
#define Z_MAX_POS 240
#define Z_MIN_POS 0
Und die Sensoren habe ich aktuell auf 5 statt 1 stehen.
Allerdings nur auf Grund von Erfahrungswerten eines Freundes.
Ob das einen Unterschied macht kann ich ehrlich gesagt nicht sagen.
#define TEMP_SENSOR_0 5
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_3 0
#define TEMP_SENSOR_4 0
#define TEMP_SENSOR_BED 5
Mit dem Autoleveling habe ich mir leider 2 Wochen die nerven kaputt gemacht und es letztlich wieder ausgebaut weil die Ergebnisse absolut nicht zufriedenstellend waren; um nicht zu sagen: die Software hat in meinen Augen Bullshit produziert. Schade aber vll. gebe ich der Sache irgendwann nochmal ne Chance. Ich konnte meinen (vermutlich selbst eingebauten) Fehler in der Einrichtung einfach nicht finden.
Nochmals danke für das Tutorial und beste Grüße
John.
Hallo erst einmal! 🙂
Echt eine sehr gute Anleitung, welche es auch mir als Laien erlaubt einen solchen Umbau auf ein anderes Board vorzunehmen. 🙂
Hätte da noch ein Anliegen.
Wie geschrieben bin ich Laie und nachdem Du hier auch einen Filament Runout Sensor erwähnt hattetst nun meine Frage.
Wie muss man den bzw. wie wird dieser Angeschlossen und in der Software eingebunden?
Wäre für Deine Hilfe echt sehr dankbar und würde mich über Antwort freuen.
Vielen Dank schon mal im Voraus.
VG,
Chris